Looking back at our 2026 successes.
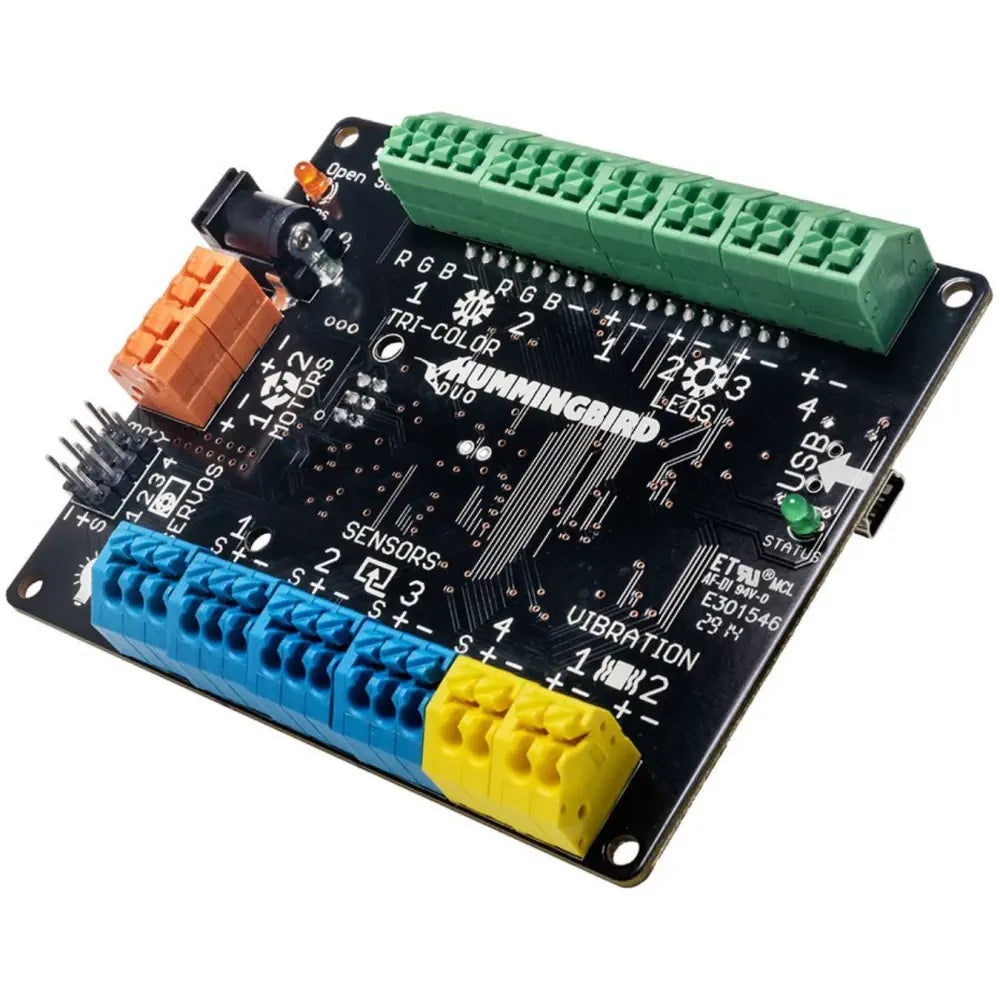
Phase 1: Component Mastery (Hummingbird Kit)
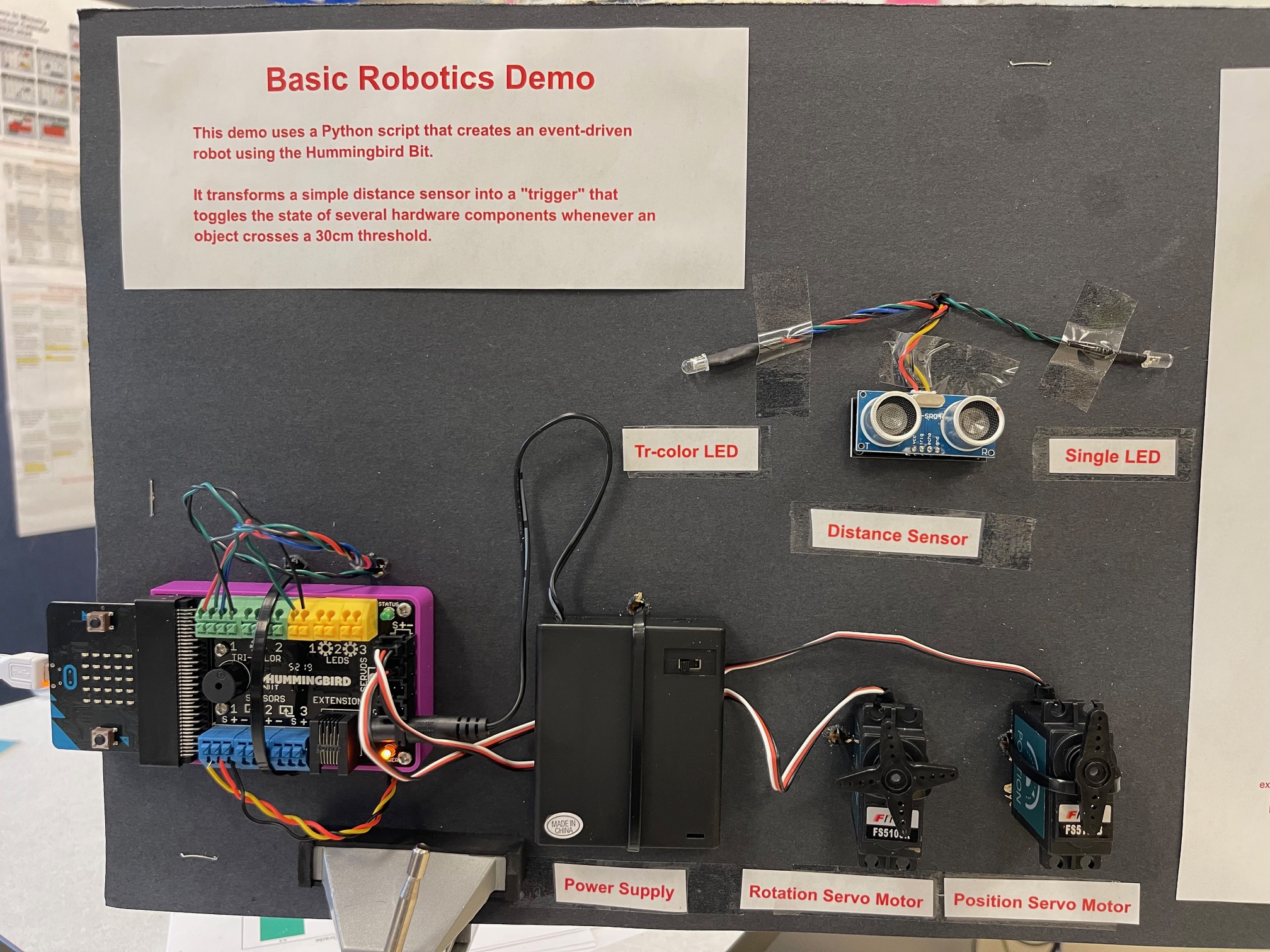
Before building autonomous systems, students mastered the individual I/O components using the Hummingbird Bit. This phase focused on understanding the relationship between physical electronic signals and Python logic.
Tri-Color & Single LEDs: Students learned to manage pulse-width modulation (PWM) to control brightness and color mixing.
Servo Motors: Mastery of both Position Servos (mapping specific angles like to ) and Rotation Servos(controlling speed and direction).
Sensor Integration: Initial experimentation with light, sound, and distance sensors to trigger specific physical outputs (e.g., "If light level < 20, turn on LED").
Phase 2: Mobile Robotics (Python-Controlled Car)
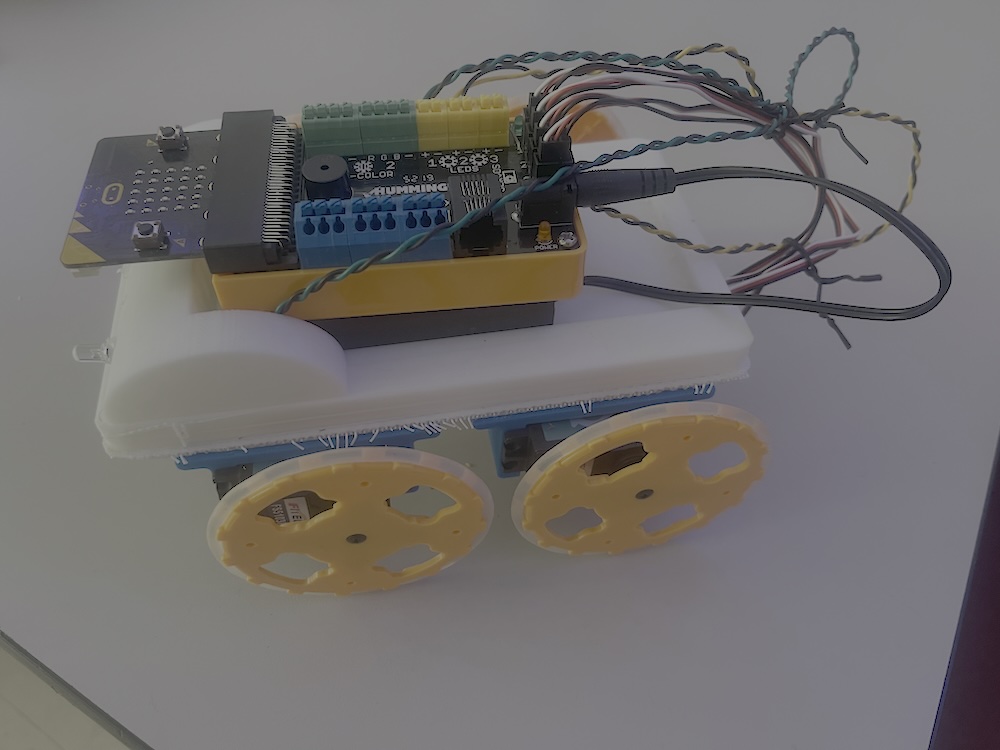
The curriculum culminated in the engineering of a robotic vehicle. This project required students to integrate several Hummingbird components into a cohesive, mobile chassis.
Key Technical Achievements:
Differential Steering: Using Python to coordinate two rotation servos simultaneously to move forward, reverse, and turn.
Autonomous Navigation: Implementing "Sense-Think-Act" loops where distance sensors allowed the car to detect obstacles and recalculate its path in real-time.
Code Efficiency: Transitioning from simple linear scripts to logic-heavy Python functions that manage motor speed based on sensor data.
Phase 3: Environmental Engineering (Arduino Weather Station)
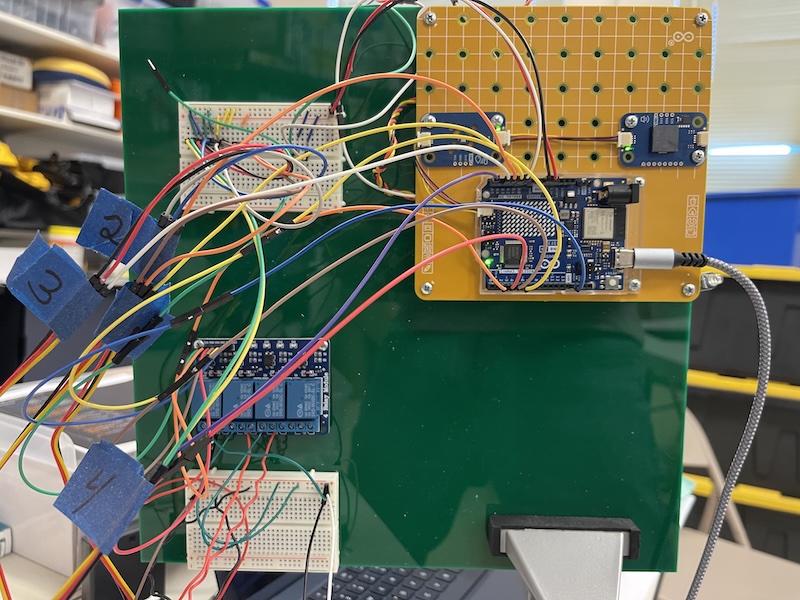
Moving beyond the Hummingbird kit, students engaged with "bare-board" Arduino microcontrollers to build a functional, multi-pump irrigation and monitoring system.
System Monitoring & Automation:
The project simulated a real-world industrial environment where sensors dictated the state of four independent water pumps.
Environmental Sensing: The system utilized a DHT sensor for humidity, a photoresistor for light levels, and soil moisture probes.
Logic-Driven Irrigation: * The Soil Pumps: Three pumps were programmed to trigger independently based on localized moisture readings in specific "zones."
The Tank Pump: A fourth pump managed the main reservoir levels, ensuring the system had a constant supply of water.
Data Feedback: Students used the Serial Monitor (and/or LCD screens) to track real-time telemetry, ensuring the thresholds for , , and were calibrated correctly for the plants.
Success Metrics
Language Progression: Students successfully migrated from basic block-style thinking to writing syntax-heavy Python and C++ (Arduino).
Systems Thinking: The ability to move from "How do I turn on a light?" to "How do I build a system that monitors four variables and controls four motors autonomously?"
Problem Solving: Debugging physical wiring alongside code logic, a critical skill in multimedia and robotics engineering.